!!!..Tahap-tahap pembuatan robot..!!!
Secara garis besar, tahapan pembuatan robot dapat dilihat pada gambar berikut:
Ada tiga tahapan pembuatan robot, yaitu:
- Perencanaan, meliputi: pemilihan hardware dan design.
- Pembuatan, meliputi pembuatan mekanik, elektonik, dan program.
- Uji coba.
1. Tahap perencanan
Dalam tahap ini, kita merencanakan apa yang akan kita buat, sederhananya, kita mau membuat robot yang seperti apa? berguna untuk apa? Hal yang perlu ditentukan dalam tahap ini:
- Dimensi, yaitu panjang, lebar, tinggi, dan perkiraan berat dari robot. Robot KRI berukuran tinggi sektar 1m, sedangkan tinggi robot KRCI sekitar 25 cm.
- Struktur material, apakah dari alumunium, besi, kayu, plastik, dan sebagainya.
- Cara kerja robot, berisi bagian-bagian robot dan fungsi dari bagian-bagian itu. Misalnya lengan, konveyor, lift, power supply.
- Sensor-sensor apa yang akan dipakai robot.
- Mekanisme, bagaimana sistem mekanik agar robot dapat menyelesaikan tugas.
- Metode pengontrolan, yaitu bagaimana robot dapat dikontrol dan digerakkan, mikroprosesor yanga digunakan, dan blok diagram sistem.
- Strategi untuk memenangkan pertandingan, jika memang robot itu akan diikutkan lomba/kontes robot Indonesia/Internasional.
2. Tahap pembuatan
Ada tiga perkerjaan yang harus dilakukan dalam tahap ini, yaitu pembuatan mekanik, elektronik, dan programming. Masing-masing membutuhkan orang dengan spesialisasi yang berbeda-beda, yaitu:
- Spesialis Mekanik, bidang ilmu yang cocok adalah teknik mesin dan teknik industri.
- Spesialis Elektronika, bidang ilmu yang cocok adalah teknik elektro.
- Spesialis Programming, bidang ilmu yang cocok adalah teknik informatika.
Jadi dalam sebuah tim robot, harus ada personil-personil yang memiliki kemampuan tertentu yang saling mengisi. Hal ini diperlukan dalam membentuk Tim Kontes Robot Indonesia (KRI) atau Kontes Robot Cerdas Indonesia (KRCI). Bidang ilmu yang saya sebutkan tadi, tidak harus diisi mahasiswa/alumni jurusan atau program studi tersebut, misalnya boleh saja mahasiswa jurusan teknik mesin belajar pemrograman.
Untuk mengikuti lomba KRI/KRCI dibutuhkan sebuah tim yang solid. Tetapi buat Anda yang tertarik membuat robot karena hobby atau ingin belajar, semua bisa dilakukan sendiri, karena Anda tidak terikat dengan waktu atau deadline. Jadi Anda bisa melakukannya dengan lebih santai.
Pembuatan mekanik
Setelah gambaran garis besar bentuk robot dirancang, maka rangka dapat mulai dibuat. Umumnya rangka robot KRI terbuat dari alumunium kotak atau alumunium siku. Satu ruas rangka terhubung satu sama lain dengan keling alumunium. Keling adalah semacam paku alumunium yang berguna untuk menempelkan lembaran logam dengan erat. Rangka robot KRCI lebih variatif, bisa terbuat dari plastik atau besi panjang seperti jeruji.
Pembuatan sistem elektronika
Bagian sistem elektronika dirancang sesuai dengan fungsi yang diinginkan. Misalnya untuk menggerakkan motor DC diperlukan h-brigde, sedangkan untuk menggerakkan relay diperlukan saklar transistor. Sensor-sensor yang akan digunakan dipelajari dan dipahami cara kerjanya, misalnya:
- Sensor jarak, bisa menggunakan SRF04, GP2D12, atau merakit sendiri modul sensor ultrasonik atau inframerah.
- Sensor arah, bisa menggunakan sensor kompas CMPS03 atau Dinsmore.
- Sensor suhu, bisa menggunakan LM35 atau sensor yang lain.
- Sensor nyala api/panas, bisa menggunakan UVTron atau Thermopile.
- Sensor line follower / line detector, bisa menggunakan led & photo transistor.
Berikut ini gambar sensor ultrasonik, inframerah, UVTron, dan kompas:




Pembuatan sistem elektronika ini meliputi tiga tahap:
- Design PCB, misalnya dengan program Altium DXP.
- Pencetakan PCB, bisa dengan Proboard.
- Perakitan dan pengujian rangkaian elektronika.
Pembuatan Software/Program
Pembuatan software dilakukan setelah alat siap untuk diuji. Software ini ditanamkan (didownload) pada mikrokontroler sehingga robot dapat berfungsi sesuai dengan yang diharapkan.
Tahap pembuatan program ini meliputi:
- Perancangan Algoritma atau alur program
Untuk fungsi yang sederhana, algoritma dapat dibuat langsung pada saat menulis program. Untuk fungsi yang kompleks, algoritma dibuat dengan menggunakan flow chart. - Penulisan Program
Penulisan program dalam Bahasa C, Assembly, Basic, atau Bahasa yang paling dikuasai. - Compile dan download, yaitu mentransfer program yang kita tulis kepada robot.
3. Uji coba
Setelah kita mendownload program ke mikrokontroler (otak robot) berarti kita siap melakukan tahapan terakhir dalam membuat robot, yaitu uji coba. Untuk KRCI, ujicoba dilakukan pada arena seluas sekitar 4×4 meter dan berbentuk seperti puzzle. Dalam arena KRCI ini diletakkan lilin-lilin yang harus dipadamkan oleh robot cerdas pemadam api. Contoh gambar robot pemadam api Ted Larsorn dan arena Kontes Robot Cerdas Indonesia (KRCI).


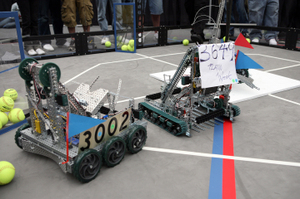
Untuk lomba robot KRI, dibutuhkan ruangan yang lebih besar, yaitu sekitar 15×15 meter. Dalam Kontes Robot Indonesia (KRI) 2008, masing-masing robot harus meraih target (bola/kubus) yang diletakkan di tempat yang tinggi, jadi sebuah robot harus bisa naik di atas robot yang lain untuk meraih target tersebut (seperti panjat pinang).
!!!..Membuat Robot Explorer Hexapod...!!!

Pendahuluan
Pada proyek robot kali ini, penulis memaparkan cara membuat robot berkaki 6 (hexapod) menggunakan 3 buah sensor, yaitu 1 sensor jarak SRF04 (
Blok Rangkaian
Robot ini bergerak berdasarkan informasi dari ketiga sensor jarak. Robot ini diharapkan dapat melakukan “eksplorasi” ke daerah yang dilaluinya, untuk memberikan informasi ke “pemiliknya” menggunakan kamera wireless misalnya, oleh karena itu robot ini dinamakan Explorer Hexapod. Gambar di bawah ini menampilkan blok rangkaian yang akan dibuat:

Gambar 1. Blok rangkaian robot Explorer Hexapod
Bahan –bahan
Berikut ini ialah bahan – bahan yang diperlukan, yang paling penting tentunya ialah kerangka dari kaki hexapod ini, yang dapat Anda buat sendiri atau membeli kit yang sudah jadi :
1. 2 buah servo motor HS311
2. Body dan kaki hexapod
(Dapat membeli kit kaki hexapod lengkap dengan 2 bh servo HS311)
3. Min. System ATmega 8535, ATmega16 atau Atmega32
4. Driver Motor DC 293D/ deKits SPC DC Motor
5. 1 sensor jarak ultrasonic SRF 04 (jarak 3cm-3m)
6. 2 sensor jarak infrared SharpGP2D12(10cm -80cm)
7. Tempat baterai 9V 2bh
Berikut ini ialah konstruksi dari kaki hexapod standar, yang digerakkan dari putaran motor servo continuous. Servo ini dikendalikan dari port B.0-3 melalui Driver motor yaitu kit DC motor Driver menggunakan IC L293D (dapat menggunakan juga kit dekits SPC DC Motor) atau jika ingin lebih kuat lagi menggunakan IC H bridge L298. Perlu diingat, kaki servo ini ada 3 pin, cukup gunakan 2 kaki yang menggerakan motor DC di dalam servo tersebut saja.

Gambar 2. Susunan sisi kaki hexapod
Servo HS311 merupakan servo dengan torsi yang cukup besar untuk menggerakkan robot dengan beban maksimal 1.5kg.
Cara kerja
Pertama, kita lihat dulu bagian sensor. Sensor SRF04 digunakan untuk mengetahui jarak depan robot, apakah ada penghalang atau tidak, yang mampu mendeteksi jarak dari 3cm hingga 3 meter. Sensor ini bekerja berdasarkan prinsip gelombang ultrasonic. Pencari jarak ini bekerja dengan cara memancarkan pulsa suara dengan kecepatan suara (0.9 ft/milidetik) berfrekwensi 40 KHz. Keluaran sensor ini dihubungkan ke Port C.0 dan Port C.1, dan dengan nilai trigger input sebesar 10 uS pada pulsa TTL. Alasan mengapa digunakan sensor ini, ialah karena sensor jarak ini paling banyak digunakan pada Kontes Robot Cerdas di Indonesia, sehingga pembaca pemula menjadi familiar. Anda dapat menambah sensor ini hingga 4 buah untuk digunakan pada sisi kanan, kiri dan belakang robot biar lebih akurat.

Gambar 3. Susunan kaki SRF04
Sedangkan 2 sensor infrared GP2D12 di sisi samping kanan dan kiri dapat mengukur jarak sejauh 10cm- 80cm dengan output analog, sehingga dapat langsung dihubungkan ke port A.0 dan port A.1 dari mikrokontroler AVR tersebut. Karakteristik dari sensor ini tidak linear, oleh karena itu idealnya perlu digunakan look up table untuk mengolah raw data dari sensor tersebut.
Hasil pembacaan sensor-sensor jarak ini diolah oleh mikrokontroler, untuk memutuskan gerakan yang akan dilakukan apakah maju, mundur atau belok. Dengan memutarnya servo, menyebabkan bagian kaki yang terhubung ke servo bergerak bergantian sehingga robot dapat berjalan.
Explorer.bas:
‘Program Demo Robot Explorer Hexapod
‘By Mr. Widodo Budiharto
‘Univ. de Bourgogne 2007
‘deklarasi fungsi dan variabel
Declare Sub Initialize_ultrasonic()
Declare Function Ultrasonic_depan() As Integer
Dim Jarakdepan As Integer
Dim Jaraksampingkanan As Word
Dim Jaraksampingkiri As Word
Dim W As Word
Config Portb = Output
Config Portd = Input
Config Portc = Output
Config Adc = Single , Prescaler = Auto , Reference = Avcc 'konfigurasi ADC
Start Adc
Call Initialize_ultrasonic ‘panggil fungsi
Do
‘baca SRF04 untuk jarak depan
…
Print "jarak sampingkiri" ; Jaraksampingkiri
‘Demo jika ada halangan, maka belok kiri
If Jarakdepan > 40 Then
Portb = 8 'maju
Wait 2 ‘delay
Else if jarak depan <40 class="SpellE">jaraksampingkanan >150 then
Portb = 0 'belok kiri
Wait 2
End If
End
Function Ultrasonic_depan() As Integer
… ' set initial state pin trigger
… ' buat pulsa 5us @ 4 MHz
… ' ukur return pulse
End Function
Sub Initialize_ultrasonic ‘inisialisasi sensor ultrasonik
…
End Sub
Gambar berikut merupakan hasil yang sudah jadi yang dapat berjalan dengan cukup cepat dan kuat karena menggunakan servo torsi tinggi dari Hitec.


A. B.
Gambar 4. Robot in action a). Tampak samping b). Tampak depan
Yup program 2007 akhirnya selesai. 2007 berhasil melakukan penemuan penemuan otak yangbaru mempelajari sesuatu yang baru mendesain dan uji coba . di post post sebelumnya usah di munculkan beberapa tentang robot.

nah kalau anda lihat diatas sistem robot ternyata rumit dan kompleks cukup kompleks. dengan anggapan membuat robot sama saja ketika kita ingin ”menghidupkan” sebuah benda mati.
mentransfer dari dalam diri kita introspeksi kedalam diri ktia bagaimana kita bisa mengetahui, kita belajar dan kita bergerak.
intinya robot adalah memanusiakan benda mati. memberi kontrol konotrol sistem.
dari robvot diatas yang saya pelajari cobakitallihat satupersatu
sensor IR.
sensor infra red adalah sensor yang memancarakan sinar dibawah panjang gelombang merah atau sekitar dibawah 400 nm karena warna merah kalau gak salah inget berada di range 400 nm. nah masalahnya jika kita hanya bisa melihat warna merah berarti sinar in tak kasat mata dan memang benar dia tidak bisa dilihat mata telanjang. infrared ada di semacam remote tv di remote AC. jugakomuniaski hp yang dulu yang adai 8210 dan 8250 dulu kalo gak salah. dulu infra red buat men multiplayer snake di handphone.balik ke sensor kita ini. berarti sensor ini ada masalah ternsendiri untuk menchek jika tidak bisa lihat bagaimana bisamengetahui dia akan aktif? ternyata ada caranya jaman sekarang sudah canggih banyak kamera baik di hp maupun digicam. dengan menggunakan alat alat tersebut kita bsia melihat sinar infra merah sebagai sinar putih.
Sifat sifat dari infra merah :
- Merambat lurus. sinar ini semacam laser.
berbeda dengan sinar senter yang memencar infra merah in ibergerak lurus bisa memantul di cermin. akibatnya hukum snellius di fisak berlalku yaitu sudut pantul dan sudut datang, akibatnya jika permukaan tidak rata bisa pergi kemana mana.
- Jarak pendek. walau dia lurus tapi jaraknya tidak jau jika realny apaling maksimal juga 10 cm. bahkan lebih pendek.
tapi jika anda ingat remote anda akan bingung kok bisa jauh? ternyata untuk itu ada roses lagi. ketika untuk mengirim data ternyata ada proses modulasi. PWM jadi infrared yang ditembak berupa pulse. akibatnya apa? jika oulse ternyata sinar ini bisa memantul kemana mana- ingat kenapa frekuensi carier harus tinggi seperti TV dll. harus amapai mega dan giga hertz. jadi dengan modulasi terebut bisa jauh. lalau ada filter untuk membaca data dan memilamilah data dari frekuensi carier yang diberikan.
- infra merah ini ternyata juga bisa memantul pada benda dengan warna putihm jadi jika warna putih dia bisa memantul tapi jika hitam tidak.. tapi in ijuga tergantung bahan , kami pernah mencoba karton warna hitam tetapi dia bisamemantul!! melawan teori, hal in iternyata penyusun bahan karton juga pengaruh. jika bahan dasar semacam plastik katanya pasti dia dapat memantul.
nah semua sensor kita gunakan 6 buah. yang dipasang 4 berjejer di belakang dan 2 di depan berjejer ada tujuan dari pemasnagan in iyang di researh dan uji coba. yaitu lihat karakteristik temapt.
ternyata untukmembuat lurus kita hanya membutuh kan 2 sensor yang akan mengatur kapan robot harus bergerak kiri dan kapan harus bergerak kanan.
2 terluar bertujuan untuk mengetahui kapan dia berbelok kiri atau tidak. sensor depan belajar kapan dia susah benar benar belok 90 derajat. dan mengetahui pertigaan.
lihat dari satu bahan bisa banyak yang dipelajari, kita masuk kebagian pengerak.
MOTOR atau pengerak yang kami gunakan adalah motor DC. motor in imerupakan motor tamiya. motor kami sambung ke gerbox. terjadi lah proses mekanika di fisika bagaimana terjadi nya rotasi dari benda besar ke benda kecil . fisika mekanika kalau gak salah hubunganya dengan torque dll. intinya kita make gerbox. dulu sanggup tipe B dengan speed lumayan. harus turun karena berat ke tipe c dengan speed lebih rendah tetapi tenaga lebih kuat. hubunganya dnegan putaran. 1 : 114. jadi satu putaran roda dibuat dari 114 putaran motor.
berat ini sangat tergantun g dari posisi acrilic letak barang bisa sangat berpengaruh bergeser 10 cm dan menyebakan pusat masa bergeser. titik berart berubah bisa menyebabkan ketidak stabilan. dalam bergerak.
kalau ada software simulasi. pasti bisa lebih baik memprediksi hal ini.
motor in ikita kendalikan dnegan PWM yaitu dengan sinyal tujuan mengatur energi yang di transfer jadi bisa atur kecepatan naik turun. kapan harus high speed kapan harus pelan pelan. dengan kecepatan antar roda yang ebrbeda menyebabkan perbedaan arah. in ihal nya dnegan vektor kalau di fisika. roda satu maju . roda satunya mundir. secara fektor jika tidak segaris umbuh akan terjadi resultant. ini juga harus dipikirkan bagimana dia bergerak dll. seru juga sih berbarti belajar kinematika juga kan.
tapi motor itu bersifat induktif motor bisa mneghasilkan noise. ingat medan listrik menghasilkan medan magnet. dan medan magnet menghasilkan medan listrik. reaksi bolak balik in menghasilkan medan magnet yang menggangu sistem!!
bahkan kamimengalamai bagaiman data yang dikirim oleh sensor bisa tejadi kekacauan kabiat satu jalur dengan kabel motor . padahal tidak short loe. sering disebut cross talk atau rugi rugi lintasan kali yah.pencegahnya kyah kami gunakan suply yang berbeda antara kendali dengan motor. cari ini kurang efektif. masih ada cara lain seprti menggunakan filter RLC atau juag menggunakan switching suply supaya tidak terganggu. atau menggunakn driver yang baik. dalam bentuk IC dan sudah dirancang khusus untuk mencegah hal ini terjadi.
menggunakan optoisolator tidak cukup membantu juga. ternayta daya motor lebih kecild ari pada daya infrared. infra red dengan frekuensi terntentu digabungkan dnegan motor bisa menyabkan resonansi. damn mengganggu kinerja sistem.. payah benar analaog ini.
soal kami masih membuat sendiri secara anual driver motor kami yaitu denan H – bride. menggunakan 4 buah transistor daya. satu h bridge untuk stau motor. tujuanya supaya motor bisa berotasi dua arah. kiri atau kanan. sehingga nanti bisa maju atau mundur.
sensor api.
komponen ini juga penting kalau gak bagaimana bisa menagkap keberadaan api. banyak yang kami pertimbangkan seperti pyro yang di desai khusus untuk api.. tapi harganya juga didesain khusus sekitar 600 rbuan. PIR sensor pasive infra red sebenarnya sensor motion yaitu mendeteksi perubahan infrared. nah dari hasil research diketahui kalu setiap benda panas mengeluarkan radiasi infrared. jadi kami anggap PIR bisa. lagian cukup murah 40 rb. tapi ternyat maslahh ada lagi PIR sangat senitiv. setiap benda panas. bahakan sebenernya PIR itu ditujukan untuk melihat pergerakan manusai jadi manusisa bergerak bisamemmici PIR aktif. picu salah. jadi perlu sekali membungkus dengan sangat baik. range PIR besar dan jauh bisa sampai 6 meter. sudut kesamping 20 derajat.
nah terakhir akhir kami menggunakan LDR saja. tapi dnega nbungkus yang baik sehingga cahaya lilin bisa tertangkap. LDR dipadukan dnegan komparator menggunakan opamp 741. bisa terdeteksi api maka cahaya terang resistansi turun. akibatnya tegangan refensi lebih besar dan ouput berubah. say abuat ketika nayala jadi low. untuk mengaktifkan interupt dan menjalankan mtor kipas.
AT89s52
nah ini otak dari robot kami, atau otak dari komputer kita kalau kata intel. AT89s52 keluarga 8051 buatan atmel ini mempunyai RAM 256 byte. user hanya bisa pake 128 Byte dan ROm sebesar 8K
Xtall kami gunakan 11.0592 mhz. dengan machine cycle sebesar 12 clock / cycle. jadi satu detik bisa melakukan 921600 machine cycle / setara 921 600 prose increment INC. atau instruksi satu cycle.
prosesos in iyang berfunsgi menkoordinasi kinerja kinerja dari senor . aturan yang ditangkap. kapan harus nyalan dan mati semua dikendalikan. kami memprogram menggunakan bahasa asembly barak, dengan kompiler. ASM51 bisa didapatkan di http://lab.binus.ac.id/pk/
sampai sukses mengorbankan banyak MCS bisa rusak perbit. dan kalau rusak data bisa aneh. in iyang kami alami. sampe 3 MCS rusak sepertinya. sering di program hapus program hapus soalnya.
setelah buat program di compile lalu lalu di burn (di downlaod ke IC) dengan menggunakan WINisp. ins system programing seri 89s52 ,S tersebut artinya mendukung serial programing.
program yang kami masukan untuk mengatasi maze dnegan sistem struktur data. link list yang dipakai. mendetksi dan menyimpan.. link list itu terpakai loh..
Sound activation
untuk untuk sound activation sya pernah bahas di post sebelumnya. tidak banyak berubah.
kesimpulanyanya. jadi membuat robot itu memerlukan bergaimacam ilmu pengetahuna yang kita gabungakan. pasti ilmu mekanika, fisika, control system, dll
tapi yag terpenting belajar dari manusia itu sendiri apa yang bisa dilakukan manusia bisa di transfer ke robot. jadi jangan berharap melakukan pa yang tidak bisa dilakukan oleh manusia.menyuruh meakukn apa yang manusia tidak bisa.
filosofinya
sense - think - action - comunicate -kerja sama
sense untuk merasakan pemilihan sensor harus bisa merasakan. gak bisa merasakan bagaimana bisa tau parameternya.
think. harus bisa perpikir bagimana bisa mengolah data jika tidak bisa
action
mau gerak tapi physic gak mampu sama dengan lumpuh
comunicate.
jangan berdiri sendiri kalu bisa komuniaski dengan master atau server. jadi bisa kirim data
teamwork
ini robot pitnar bisa lain berkerja sama dengan robot lain. bisa berpikir sendiri dan gesit. pasti ini robot masa depan
so selamat buat robot…..
buat dari sederhana. pertama line follower - line folower yang bisa deteksi pertigaan dan memimilih
dll


0 komentar:
Posting Komentar